How Does PID Work?
Key Takeaway
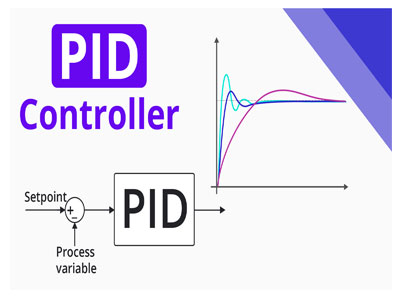
A PID controller works by continuously adjusting the control output to maintain a desired setpoint. It reads a sensor to get the current process variable and then calculates the necessary adjustments using three components: Proportional, Integral, and Derivative.
The Proportional component reacts to the current error between the setpoint and the actual value. The Integral component sums past errors to eliminate any residual offset. The Derivative component predicts future errors based on the current rate of change. By summing these three responses, the PID controller computes the precise output needed to keep the system stable and accurate. This method ensures efficient and reliable control in various applications, from industrial processes to automation systems.
Basic Principles of PID Control
PID control, which stands for Proportional-Integral-Derivative control, is a widely used feedback mechanism in industrial control systems. The main objective of PID control is to maintain a process variable, such as temperature, pressure, or flow rate, at a desired setpoint by continuously adjusting the control inputs. PID controllers achieve this by calculating an error value as the difference between the setpoint and the actual process variable. This error value is then used to compute the control output by applying the three components of PID: Proportional, Integral, and Derivative.
The Proportional component provides an immediate response to the current error, the Integral component addresses accumulated past errors, and the Derivative component anticipates future errors based on the current rate of change. By combining these three elements, PID controllers can provide precise and stable control, even in systems with complex dynamics and varying conditions. Understanding the basic principles of PID control is essential for effectively designing and tuning control systems in various industrial applications.
The Role of Proportional Control
The Proportional component of PID control is responsible for generating a control output that is directly proportional to the current error. The Proportional gain, denoted as Kp, determines the sensitivity of this response. A higher Kp value results in a stronger reaction to the error, leading to faster corrections. However, if Kp is too high, it can cause the system to oscillate and become unstable.
The Proportional control works by applying a correction that is proportional to the magnitude of the error. For example, if the error is large, the control output will be significantly higher, prompting the system to make a substantial adjustment to bring the process variable closer to the setpoint. Conversely, if the error is small, the correction will be minor, fine-tuning the system’s performance.
While Proportional control is effective in reducing the error, it cannot eliminate it entirely. There will always be a residual steady-state error because the control output is directly tied to the error magnitude. This limitation highlights the need for the Integral and Derivative components to achieve more precise and stable control.
The Role of Integral Control
The Integral component of PID control addresses the accumulated error over time. The Integral gain, represented as Ki, determines how strongly the accumulated error influences the control output. By summing the error over time, the Integral component generates a correction that helps to eliminate the residual steady-state error left by the Proportional component.
The Integral control works by integrating the error, which means it sums up all past errors to provide a cumulative correction. This approach ensures that any persistent deviation from the setpoint is gradually corrected. For instance, if the system consistently operates below the setpoint, the Integral component will increase the control output to bring the process variable up to the desired level.
One of the key benefits of Integral control is its ability to eliminate steady-state errors, ensuring that the process variable eventually reaches and maintains the setpoint. However, if the Integral gain is set too high, it can lead to overshooting and instability, as the system may overcorrect for the accumulated error. Proper tuning of the Integral component is essential to balance responsiveness and stability in the control system.
The Role of Derivative Control
The Derivative component of PID control predicts future errors by analyzing the rate of change of the current error. The Derivative gain, denoted as Kd, determines the influence of this predictive adjustment on the control output. By considering how quickly the error is changing, the Derivative component provides a damping effect that helps to prevent overshooting and oscillations.
The Derivative control works by calculating the derivative of the error, which means it assesses the slope or rate of change of the error over time. This information allows the controller to anticipate future trends and apply a preemptive correction. For example, if the error is decreasing rapidly, the Derivative component will reduce the control output to avoid overshooting the setpoint.
The primary benefit of Derivative control is its ability to enhance system stability by smoothing out the control response. It effectively dampens oscillations and reduces the likelihood of overshooting, leading to more stable and accurate control. However, if the Derivative gain is set too high, it can make the system overly sensitive to noise and rapid fluctuations, resulting in erratic behavior. Therefore, careful tuning of the Derivative component is crucial to achieve optimal performance.
Combining PID Elements for Effective Control
The true power of PID control lies in the combination of its three components: Proportional, Integral, and Derivative. Each component addresses a different aspect of the control problem, and their combined action provides a robust and versatile solution for maintaining the desired process variable. By tuning the Proportional, Integral, and Derivative gains appropriately, engineers can achieve precise and stable control in various applications.
The Proportional component provides immediate correction based on the current error, ensuring a quick response to deviations from the setpoint. The Integral component eliminates steady-state errors by addressing accumulated past errors, ensuring the process variable reaches and maintains the setpoint over time. The Derivative component enhances stability by predicting future errors and applying a damping effect to prevent overshooting and oscillations.
Effective PID control requires careful tuning of the three components to balance responsiveness, stability, and accuracy. Engineers often use methods such as the Ziegler-Nichols tuning method or trial-and-error approaches to find the optimal settings for the PID gains. By iteratively adjusting the Proportional, Integral, and Derivative gains and observing the system’s response, they can fine-tune the controller to achieve the desired performance.
In practice, PID controllers are widely used in various industries, from manufacturing and process control to HVAC and automotive systems. Their ability to provide precise and stable control makes them indispensable for applications that require accurate regulation of temperature, pressure, flow rate, and other process variables.
Conclusion
Mastering PID control is essential for engineers and technicians needing precise and stable control of process variables. Understanding Proportional, Integral, and Derivative components, and how they work together, is key to effective system design and tuning. By leveraging each component and tuning PID gains, engineers achieve optimal performance across various applications.
PID control offers a robust solution for maintaining setpoints in systems with complex dynamics and varying conditions, such as temperature regulation in manufacturing, pressure control in chemical reactors, or motor speed management. For newly joined engineers, proficiency in PID control enhances their ability to design and optimize control systems, contributing to improved process efficiency, product quality, and operational performance.